

Witold Jaworski
-
Content Count
176 -
Joined
-
Last visited
About Witold Jaworski
-
Rank
Rivet Counter

- Birthday 06/07/1968
Recent Profile Visitors
4,496 profile views




-
 I am working on the new (fourth) edition of my "Virtual Airplane" guide. Last week I completed its second volume: "Modeling". It describes, how to build an accurate 3D model of a historical aircraft, on the example of the Curtiss P-40B fighter. Comparing to the previous edition (from 2015), I rewrote 80% of its content, introducing significant changes in the proposed workflow (taking advantage of the new Blender features, which have been introduced since that time). In 2020 I already published the first volume of this series: "Preparations". This means, that at this moment we already
I am working on the new (fourth) edition of my "Virtual Airplane" guide. Last week I completed its second volume: "Modeling". It describes, how to build an accurate 3D model of a historical aircraft, on the example of the Curtiss P-40B fighter. Comparing to the previous edition (from 2015), I rewrote 80% of its content, introducing significant changes in the proposed workflow (taking advantage of the new Blender features, which have been introduced since that time). In 2020 I already published the first volume of this series: "Preparations". This means, that at this moment we already -
P-40B (based on the original Curtiss blueprints)
Witold Jaworski replied to Witold Jaworski's topic in In-Progress Pics
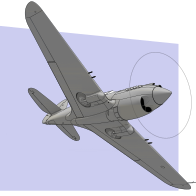
In this post I will complete the 3D reference that I started in the previous post. Here is a link to the Blender file that contains 3D reference skeleton of the "long nose" P-40, described in the text below. It was compiled from all available blueprints. Studying the dimmed blueprint scans, I was not able to read some horizontal ordinates placed close to the top and bottom segments of this fuselage. This created gaps in my 3D grid (Figure "a", below): Fortunately, in the fuselage ordinates diagram (dwg 75-21-020) I was able to identify ordinates of two vert -
P-40B (based on the original Curtiss blueprints)
Witold Jaworski replied to Witold Jaworski's topic in In-Progress Pics
Thank you for reading! 🙂 -
P-40B (based on the original Curtiss blueprints)
Witold Jaworski replied to Witold Jaworski's topic in In-Progress Pics
At this moment I am working on second volume of my book about 3D modeling. It describes building a 3D model of a WW2 aircraft on the example of the P-40B. Preparing for this work, I discovered that the original documentation of this early P-40 variant (also known as "long nose Warhawks") is missing. On the other hand – you can find plenty of the "short nose Warhawk" blueprints (related to the P-40D later variants), as well as some P-36 drawings. I started by picking over 1000 original Curtiss blueprints and sketches related to the P-40, XP-40, and the P-36 from the vast resources of the AirCor -
I decided to upload the Blender file in which I reproduced in the 3D space the original ordinates of the SBD fuselage and wing. (I described creation of this 3D reference in my previous posts). I think that in this form they can be useful for other modelers, who would like to recreate the geometry of this aircraft. Here is the link to the *.blend file (102MB) that contains the model presented below: The fuselage ordinates are organized into horizontal “water lines” (blue), vertical “buttock lines” (green) and resulting se
-
P-40B (based on the original Curtiss blueprints)
Witold Jaworski replied to Witold Jaworski's topic in In-Progress Pics
A new source of the accurate aircraft geometry and original blueprints! (this is an update of post #1 from this thread, because the blueprint source I recommended there - the plans.aero portal - disappeared a year ago) For over ten years Hugh Thomson has published marvelous posts in his blog about the historical aircraft. Just look there to see the P-51 Mustang, F6F Hellcat, F4F Wildcat and B-25 Mitchell CAD models and – what is sometimes even more important – compiled datasheets of their ordinates. The true, accurate geometrical data are usually dispersed and dif -
P-40B (based on the original Curtiss blueprints)
Witold Jaworski replied to Witold Jaworski's topic in In-Progress Pics
Thank you! However in this case you can see the effect of their skills with this CNC machine, not mine 🙂 -
P-40B (based on the original Curtiss blueprints)
Witold Jaworski replied to Witold Jaworski's topic in In-Progress Pics
A little bit off-topic: An interesting project realized by BEK Milling Solutions. Their CNC machine is cutting out a P-40 model in 1:2 scale, from a styrofoam block. For the input geometry, they used my old model of the P-40B: Actually, I am working on a more accurate one, based on the original blueprints. However, their deadlines did not allow them to wait for this update. -
P-40B (based on the original Curtiss blueprints)
Witold Jaworski replied to Witold Jaworski's topic in In-Progress Pics
Yes, I suppose that modeling various cast details, like engine crankcases, hydraulic hubs, etc. is much easier in such a full-blown CAD/CAM like Fusion 360. The main reason is its advanced functionality for modeling various fillets. Blender lacks it (its bevels/fillets are restricted by the edges of the two adjacent faces), which makes modeling such complex shapes quite difficult. This is the advantage of this Autodesk product. However, for my ultimate goal (creating aircraft visualizations) Fusion 360 also has some drawbacks: the lack of advanced, physics-based render en -
This February I found among the SDASM resources a diagram (dwg no 5060837), which describes the geometry of the SBD fuselage. This is the key piece of the information that was missing in the NASM microfilms I used before. Below you can see these lines: The original drawing is slightly distorted. I was able to stretch its upper and lower portions, so in the central part its rectangular “grid” fits the blue guide lines drawn in Inkscape. However, this is a non-linear deformation, so it still occurs along the edges of this image. (In the illustration above, I marked the
-
This time a technical post about the overall dimensions of the subsequent Dauntless versions. We are using these values for scaling the reference drawings. If they are wrong - the whole model you are building is also wrong. That’s why they are so important: _________________________________________________________________________________________________ Since 2015 I have tried to determine the true length of the early SBD Dauntless versions (the SBD-1, -2, and -3). There was something wrong with the source of this information: the original BuAer performance data sheets. You can find the
-
I just published a book which discusses details of preparing/using reference drawings. I think that it can be useful for all modelers, including "plastic kit" modelers and the authors of the scale plans. Among other issues, it includes some materials presented in this blog. See here for details.
-
P-40B (based on the original Curtiss blueprints)
Witold Jaworski replied to Witold Jaworski's topic in In-Progress Pics
This June I started working on a new (fourth) edition of my book about aircraft computer models. Actually, I am finishing its first volume (“Preparations”). It describes how to prepare accurate reference drawings of a historical airplane, on the example of the P-40. Below you can see two of its pages (as they appear my screen): Comparing to the third edition, I altered here the proposed workflow, using Inkscape as my basic tool. I also wrote more about eventual errors, which you can find in typical scale plans. In the appendices I included a section about the original P-40 blueprint -
(Continuation of the previous post) After shaping this side contour (it corresponds to longeron #01 in the SBD skeleton) I also recreated the 14 remaining longerons. Their locations match the structure of the real aircraft: In fact, it was quite slow process: I had to fix minor differences in the bulkhead shapes along each longeron. Sometimes the line of newly added longeron forced me to correct the previous one. The surfaces of front and rear wing fillet cones were a great help: without them I could not properly form the complex shape of longeron #09 or longeron #12.
-
(Continuation of the previous post) The updated, somewhat shorter outer wing segment fits much better the reference photos (this is another confirmation that I read properly its assembly drawings). Now I used these photos for checking the fuselage side contour: It is interesting that in this way I am comparing the real aircraft with its blueprint (in this case – the side view of the structure assembly). As you can see in the picture above, I found some differences along the upper edge of the tail. Figure below shows their details: First,